Increasing the delivery capacity within existing utility corridors has been identified as critical in solving the energy shortage in the Pacific Northwest. Eager to meet rising consumer demand, PG&E Gas Transmission, Northwest (GTN) recently applied to the Federal Energy Regulatory Commission for a Certificate of Public Convenience and Necessity to expand facilities along its 612-mile natural gas line corridor from the Idaho-Canada border to Klamath Falls, Oregon. To support its client in this application, Essex Environmental developed in 10 weeks a sophisticated GIS that required base mapping with an accurate digital elevation model (DEM) and 2-foot resolution digital orthophotography.
Spencer B. Gross, Inc. and Essexĺs GIS team could not have met the tight schedule using traditional mapping methodologies. Instead, the group took an innovative approach, integrating Light Detection and Ranging (LIDAR) and aerial photography with airborne GPS and an inertial measurement system (IMS). This strategy greatly reduced the amount of ground control required, minimized photo control procedures, and allowed direct generation of a suite of products. The entire GTN project area was flown in three days, and the products were delivered on schedule.
Technology applications such as LIDAR and GPS/IMS aerial photography are increasingly used to provide accurate base mapping on a compressed schedule. The utility industry is positioned to evaluate opportunities to increase capacity and services, but it cannot always wait for traditional mapping data to inform decision-making. In addition to data collection and processing, a robust GIS project requires a complete and flexible data set to geo-reference field-collected data and existing as-built maps. The fast-track approach can easily validate the GIS professionalsĺ work and satisfy permitting requirements, facilitating an effective industry response to energy demand.
LIDAR technology is 30 years old, but only in the last 5 to 6 years has it spawned the commercial systems and reliable data sets to make it a GIS tool. Although the latest LIDAR systems do not represent rocket-science breakthroughs, their enabling technologies do maximize components and vision resulting from space exploration. The GTN project used LIDAR flown from a conventional aircraft, the latest measurement equipment, and fundamental surveying principles.
A LIDAR system is based on a precision-engineered laser scanner with the capacity to emit 20, 000 to 30,000 pulses per second, range the point of reflection based on the speed of light, and record the slant range distance and angle. Coupled to the scanner is a high-performance airborne GPS, co-initialized with another similar GPS set up over a known point, and an inertial measurement system. These components measure the x-y-z position of the sensor in 3D space and the orientation of each pulse (i.e., the rotation angle). Joined with an ultra-timing device, these systems provide accurate detection and ranging of features above the surface and points to define the bare-earth surface. Through post-processing, surface elevation models (SEM) and DEMs are developed. LIDAR service providers must calibrate these systems to ensure the locations of the LIDAR reflections are measurable in absolute terms (i.e., fixed to real-world coordinates).
The mapping of utility corridors also requires high-resolution digital orthophotography because most original natural gas pipeline features were constructed in a time of limited spatial measurement technology. Utilizing the GPS-IMS solution for a precision metric camera, imagery offers a direct solution: It captures the photography with the GPS for the cameraĺs perspective center point and the IMS for the cameraĺs orientation parameters. The result is elimination of rigorous, time-intensive aero-triangulation and, thus, greatly reduced delivery time.
This solution quickly delivers high-resolution digital imagery by utilizing directly collected photo control and accurate surface models.
The existing 612-mile natural gas line corridor starts at the Canada border near Sand Point, Idaho and ends at Klamath Falls, Oregon. The easement varies in width, but it is approximately 1-mile wide, and traverses a variety of vegetation communities and terrain. In general, the centerline has been reasonably located on published USGS maps and with as-built alignment sheets of varying scale and accuracy.
The collection of LIDAR and IMS photos included a conservative buffer to accommodate for variations in the easement and mathematical redundancy in the approach to data reduction. Scheduling did not allow for supplemental surveys to locate precisely the easement and adjoining areas.
The schedule was accelerated to meet the needs of several field crews collecting along the corridor thematic environmental data that went into the building of the GIS data structure. The data was funneled into an Esri ArcView environment: digital orthophotos, SEM, DEM, field-collected data, client-provided base mapping, and government-provided data sets.
This effort provided accurate and measurable GIS data products to support the permitting process and increase the capacity of pipeline segments along the mainline. All of the project stakeholders and consulting specialists could use the data.
Project deliverables included 0.6-meter (2-foot) pixel resolution, color, digital orthophotography, 2-meter contours, black/white orthophotos for field use, and mapping and imagery in a variety of formats for CAD and GIS applications.
All of the LIDAR and aerial photography were collected in three days. Multiple GPS base stations were set up every 50 miles along the route, and four GPS field crews worked a day ahead of the LIDAR/photo crews. Validation targets and cross-flights ensured that the data were collected accurately and validated at the time-of-collection. No re-flights were required.
Immediately after the initial data collection, a third-party surveyor collected 32 GPS ground points along the corridor for validation purposes. As depicted in Figure 1, the surveyor was directed to remote locations along the route to provide the photogrammetrists at Spencer B. Gross, Inc. with the ground measurements required to validate the data collection. The root mean square error (RMSE) for the data collection was 17-centimeter vertical variation.

After data validation, the LIDAR was processed into usable data sets. First, the SEM was developed by removing noise and tiling the data. Because LIDAR data are approximately 25 to 30 times the size of normal terrain data, tiling is key to making the decision process effective.
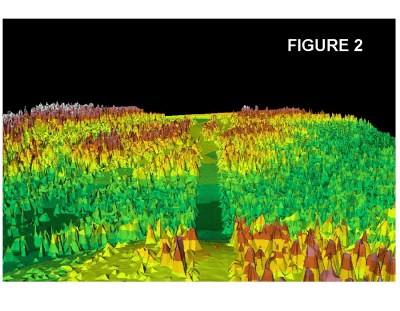
Figure 2 is a triangulated irregular network (TIN) of the first surface SEM for a portion of the corridor in a dense vegetation area; note the crossing corridors and the trees.
The data undergo further processing to develop a bare-earth elevation model (DEM) of the same area; see Figure 3.
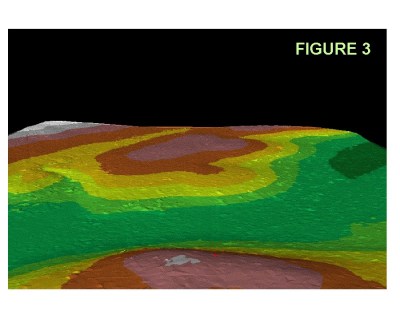
Figure 4 is a 2D view of the same corridor showing the primary corridor and intersecting transmission line corridor from the 2-foot digital orthophoto database.

Figure 5 is a TIN model of the same area as Figure 4 of the SEM illustrating the vegetation component along the corridors.
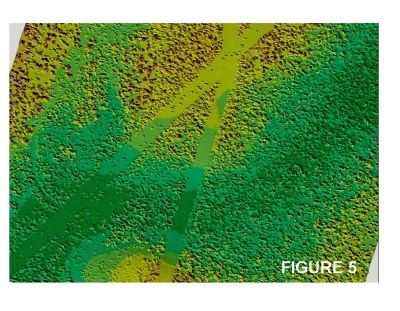
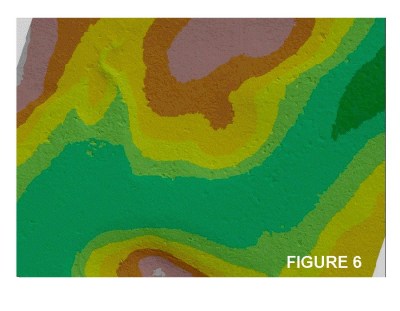
The LIDAR DEM is merged with the oriented aerial photography in an orthophoto processing environment to produce a 2-foot pixel digital orthophoto (refer to Figure 4). The SEM model (Figure 5) illustrates the vegetation component of the area and complements the digital orthophoto. The bare-earth DEM (see Figure 6) is a vertical TIN of the same area showing the variability of the terrain.
The 40 GB of orthophoto raster data, 2 GB of SEM, DEM, and contours provided the GIS system with a solid foundation for a base mapping and layer development. All digital imagery and terrain data were organized, cataloged, and named with a developed protocol.
A universal transverse Mercator (UTM) projection system was selected based on the projectĺs north-south orientation, the corridorĺs 612-mile coverage area, and the need for data consistency. The pipeline location covered two UTM zones with the majority of project area located in zone 11.
Once the digital imagery was integrated into the GIS system, the pipeline location and corridor easement were established from field surveys and as-built alignment sheets. The imagery served as the base map on which all collected data were projected and quality controlled. The created GIS thematic layers greatly assisted in the project demands by integrating several complex and diverse resources into one comprehensive GIS interface. The required data that assisted in the complex planning process included the following: Pipeline Location, Proposed New Pipeline, Location,Reroute Alternatives, Mileposts along the Pipeline, Aboveground Facility Locations, Access Roads, Land Ownership, Field-derived GPS Data for Biological Resources, Wetland Areas and Stream Networks, Classified Vegetation, Right-of-Way Corridor from Ground Surveys
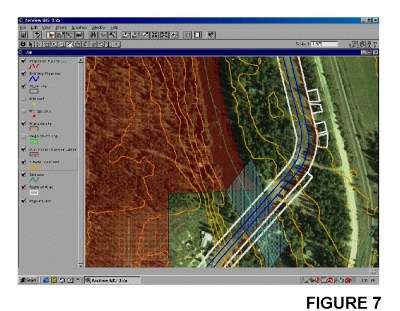
Figure 7 is an ArcView application illustrating the merging of several database and derived data sets; note the easement, variations to the easement, and the base orthophoto and contour data.
From the GIS analysis, the utility could make informed decisions about the segments on which to increase capacity and apply for the required permits. The accuracy and completeness of the base mapping resulted in credible GIS mapping for this important project.
Using advanced technologies for data collection appears to be the most efficient method to support fast-track utility corridor mapping. Even without extensive cost-benefit analysis, the approach clearly facilitates: significantly quicker results, more complete data, less expense (base costs the same, but substantially less field time), and flexible products (meeting existing and future needs).